1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
|
//-----------------------【头文件、命名空间包含部分】-----------------------------
// 描述:包含程序所使用的头文件和命名空间
//---------------------------------------------------------------------------------
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
using namespace cv;
//-----------------------------------【ShowHelpText( )函数】------------------------
// 描述:输出一些帮助信息
//----------------------------------------------------------------------------------
void ShowHelpText()
{
//输出欢迎信息和OpenCV版本
printf("\n\n\t\t\t非常感谢购买《OpenCV3编程入门》一书!\n");
printf("\n\n\t\t\t此为本书OpenCV3版的第28个配套示例程序\n");
printf("\n\n\t\t\t 当前使用的OpenCV版本为:" CV_VERSION );
printf("\n\n ----------------------------------------------------------------------------\n");
}
//-------------------------------【main( )函数】-----------------------------------------
// 描述:控制台应用程序的入口函数,我们的程序从这里开始执行
//-------------------------------------------------------------------------------------
int main( )
{
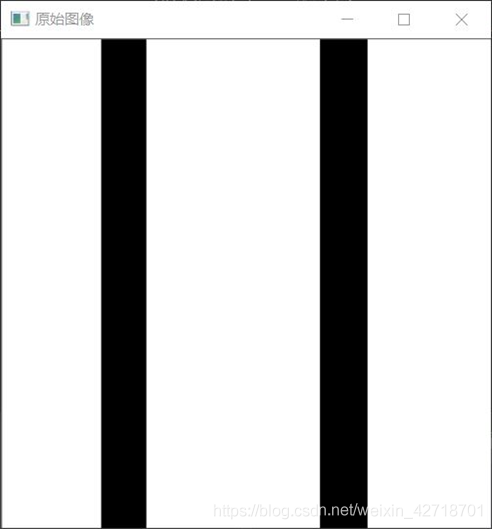
//【1】以灰度模式读取原始图像并显示
Mat srcImage = imread("feng.png", 0);
if(!srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定图片存在~! \n"); return false; }
imshow("原始图像" , srcImage);
ShowHelpText();
//【2】将输入图像延扩到最佳的尺寸,边界用0补充
int m = getOptimalDFTSize( srcImage.rows );
int n = getOptimalDFTSize( srcImage.cols );
//将添加的像素初始化为0.
Mat padded;
copyMakeBorder(srcImage, padded, 0, m - srcImage.rows, 0, n - srcImage.cols, BORDER_CONSTANT, Scalar::all(0));
//【3】为傅立叶变换的结果(实部和虚部)分配存储空间。
//将planes数组组合合并成一个多通道的数组complexI
Mat planes[] = {Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F)};
Mat complexI;
merge(planes, 2, complexI);
//【4】进行就地离散傅里叶变换
dft(complexI, complexI);
//【5】将复数转换为幅值,即=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); // 将多通道数组complexI分离成几个单通道数组,planes[0] = Re(DFT(I), planes[1] = Im(DFT(I))
//void magnitude(InputArray x, InputArray y, OutputArray magnitude);
magnitude(planes[0], planes[1], planes[0]);// planes[0] = magnitude
Mat magnitudeImage = planes[0];
//【6】进行对数尺度(logarithmic scale)缩放
magnitudeImage += Scalar::all(1);
log(magnitudeImage, magnitudeImage);//求自然对数
//【7】剪切和重分布幅度图象限
//若有奇数行或奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
//重新排列傅立叶图像中的象限,使得原点位于图像中心
int cx = magnitudeImage.cols/2;
int cy = magnitudeImage.rows/2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy)); // ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy)); // ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy)); // ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy)); // ROI区域的右下
//交换象限(左上与右下进行交换)
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//【8】归一化,用0到1之间的浮点值将矩阵变换为可视的图像格式
//此句代码的OpenCV2版为:
//normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
//此句代码的OpenCV3版为:
normalize(magnitudeImage, magnitudeImage, 0, 1, NORM_MINMAX);
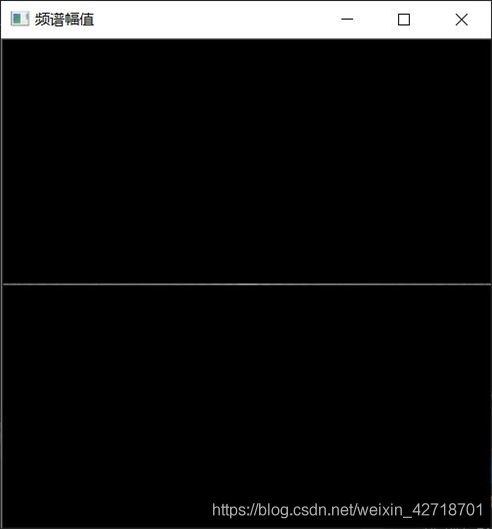
//【9】显示效果图
imshow("频谱幅值", magnitudeImage);
waitKey();
return 0;
}
|